RAFS - Movement Details
Movement Details
This task deals with robot movement and wandering behavior within the Engineering
Building, room 2029. This module will enable the robot to randomly wander around
EB 2029 while the object recognition module executes in the background. When
an object (chair) is found, movement will halt and object recognition will take
control.
Movement Research
In order to enable the robot to move, there are some basic API functions that
will be used. We will spend a few days researching functions to make the robot
move, along with looking on the web for additional example movement code.
Study Examples
Previously, we had researched and found some examples to study. Now we will
test those examples and look at the code more in depth. By doing this, we should
get a better understanding of how to go about developing our own movement module.
Learn Mapping Program
The ActivMedia website has a software package called "Basic Suite."
In this package is a tool called "Mapper." This tool is used to create
world files that define the robots surroundings. This subtask will familiarize
us with this package, and determine to what extent we can rely on using this
in our project.
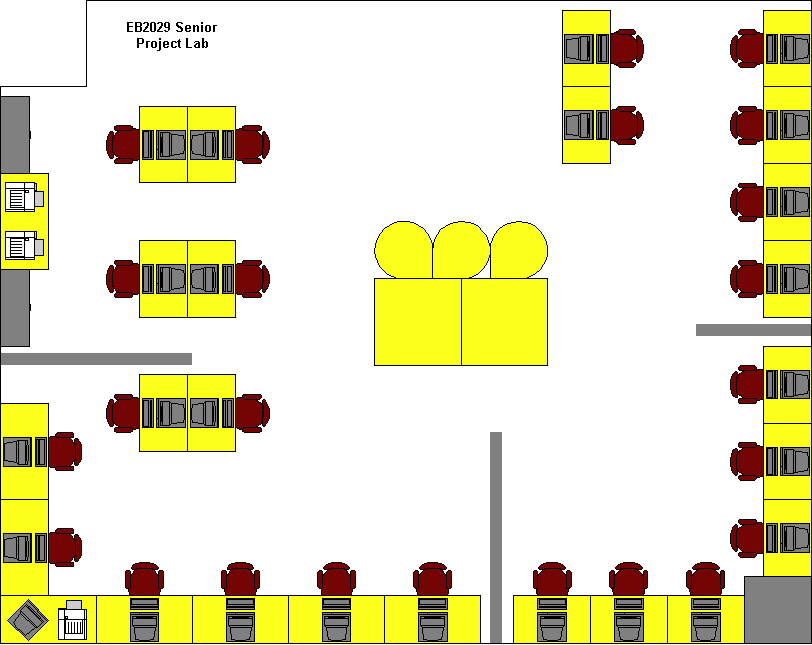
Measure Room and Furniture
This subtask goes along with the "Mapper" program. Here we take all
measurements of the room and static objects in order to create the world file.
This world file will be used by the robot to navigate the room and determine
where stationary objects (walls) are.
Draw Rough Map of EB 2029
This is simply taking our knowledge of the "Mapper" utility and our
measurements of EB 2029 and putting them all to use in the creation of an EB
2029 world file. This map will contain the walls, desks, and all other static
objects. The robot will then assume that these objects are located where they
are assigned in the world file.
Write Simple Sample Code
We will begin to write some sample movement code of our own. We might start
out with something similar to our RAFS square and test it out with our map.
We will then gradually work in some more complex movements.
Develop Movement Module
We will develop our own wander behavior program in this stage, so that the
robot will continuously roam about EB 2029.
Refinement of Module
This step will be for improving the module we already wrote. The other teammates
will offer suggestions to improve the module. How this module is going to interact
with the object recognition module should be addressed.