| Designs | Feedback |
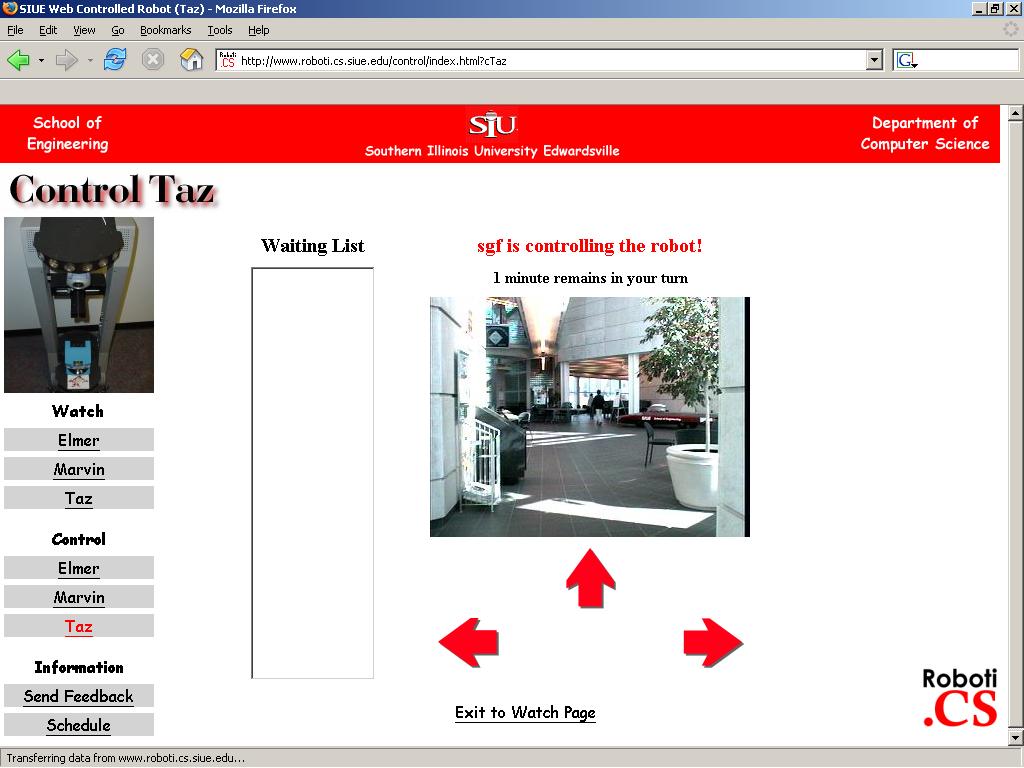
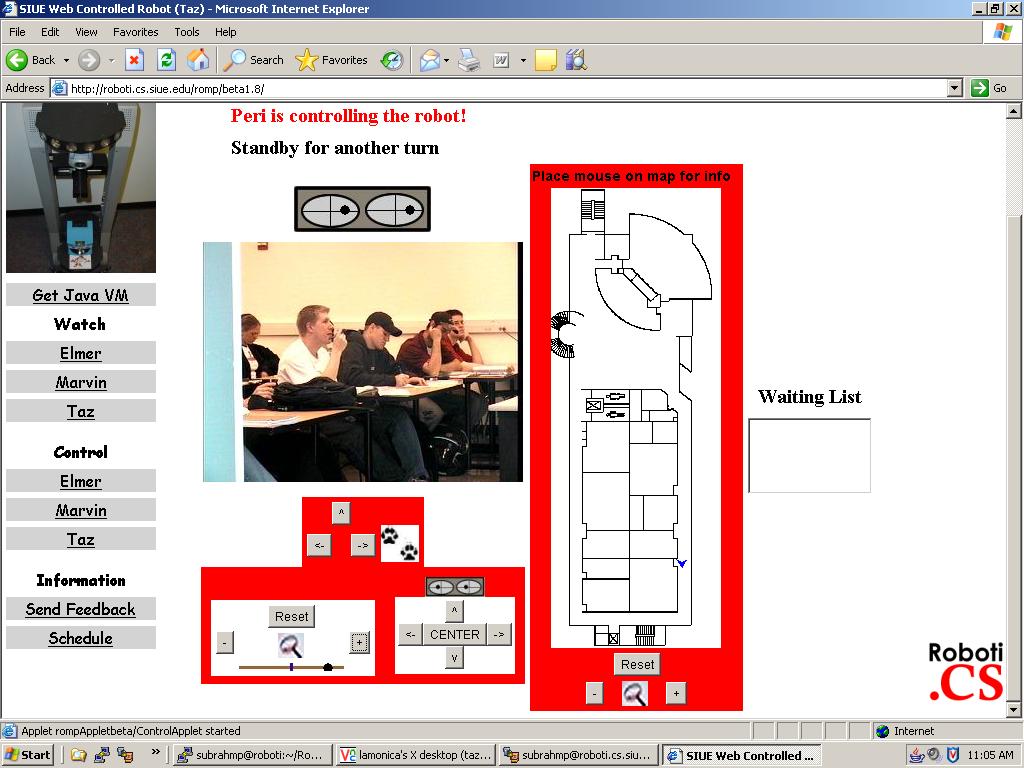
| Current Interface | This is the current interface that is functional. |
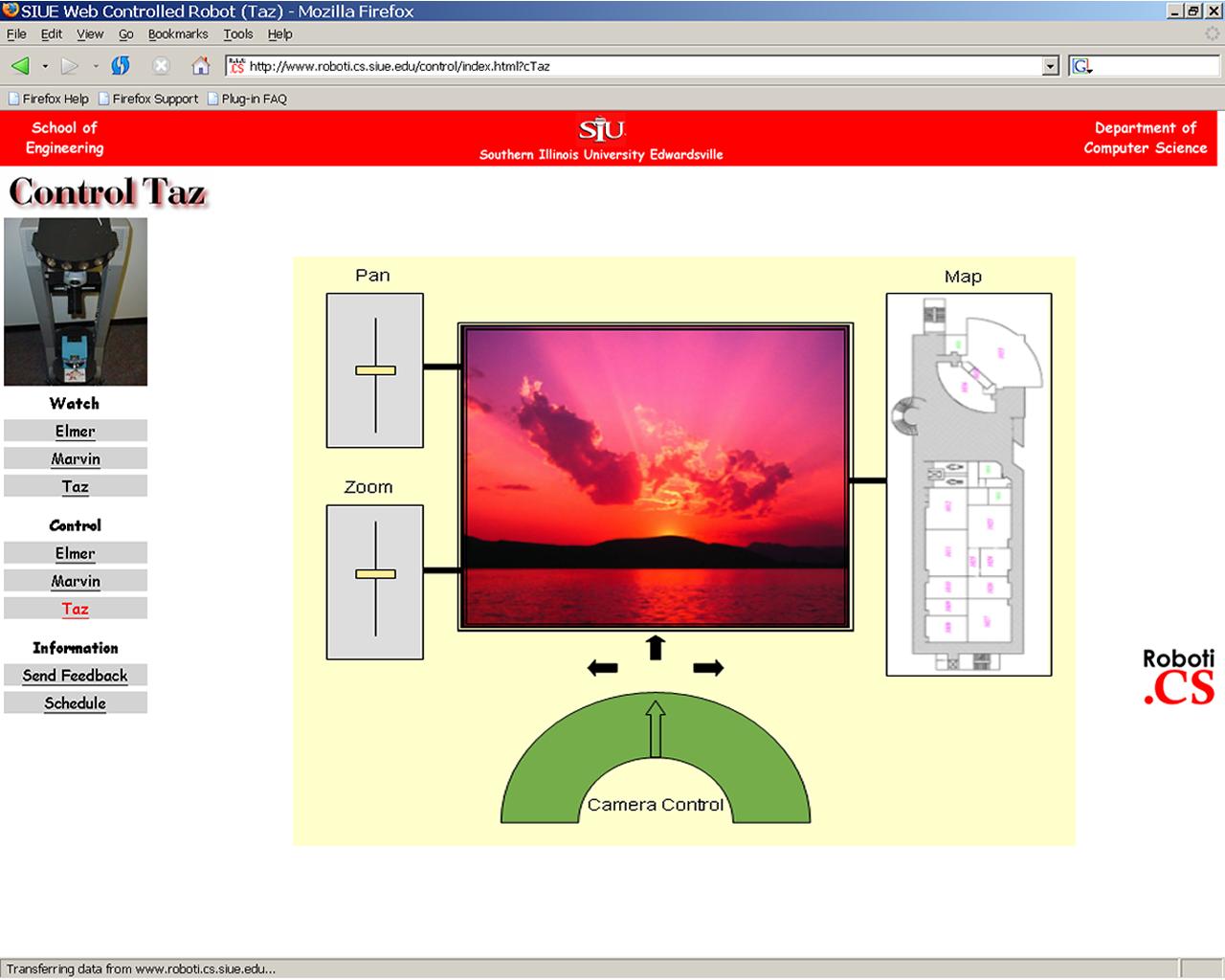
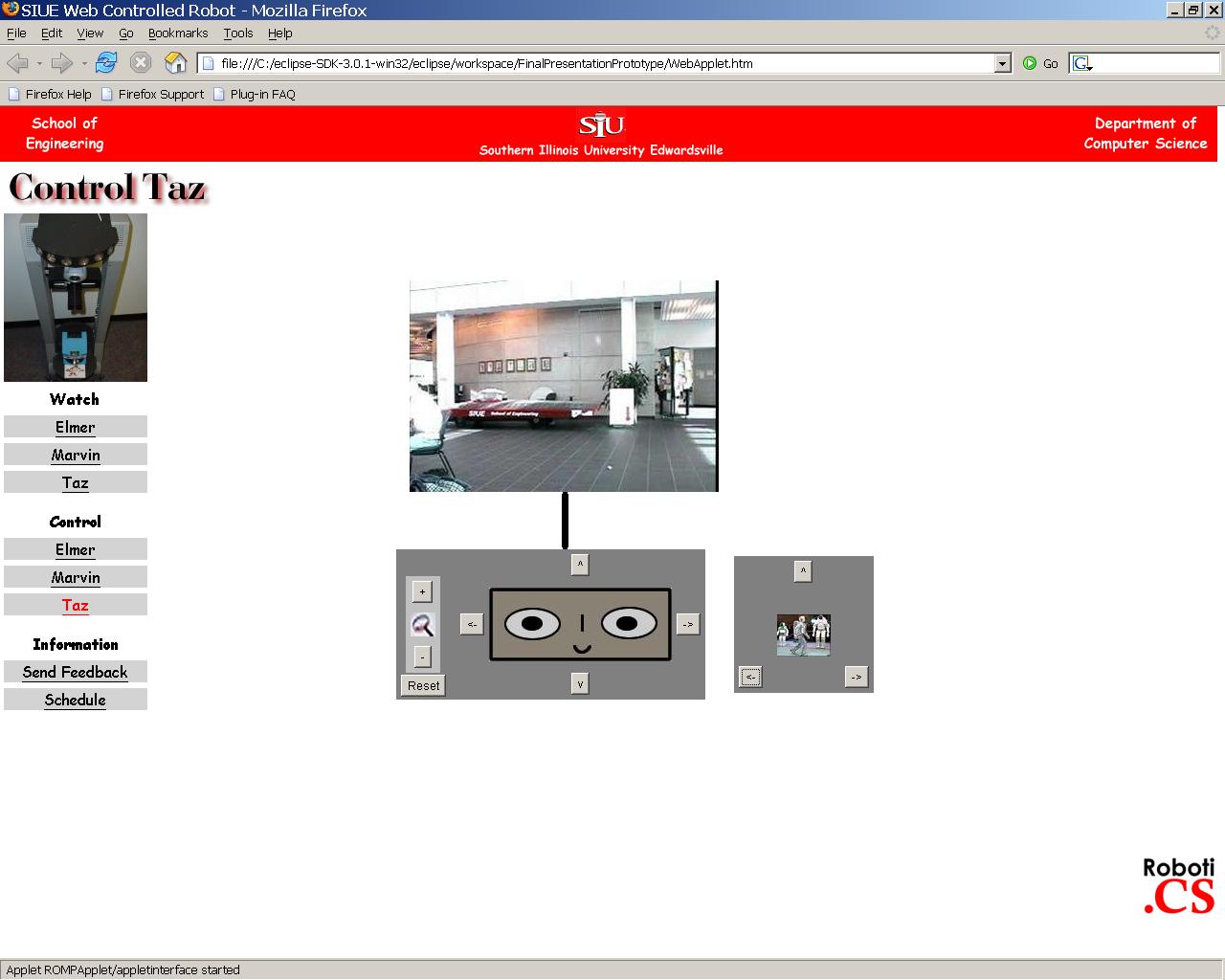
| Design 1 | This was the initial design. But soon we realized we were working with java.awt where grpahics capability is limited. The controls are not close together hence does not cater for easier navigation. |
| Prototype 1 | Not tested. |
| Prototype 2 | Not tested. |
| Prototype 3 | Not tested. |
| Prototype 4 | Not tested. |
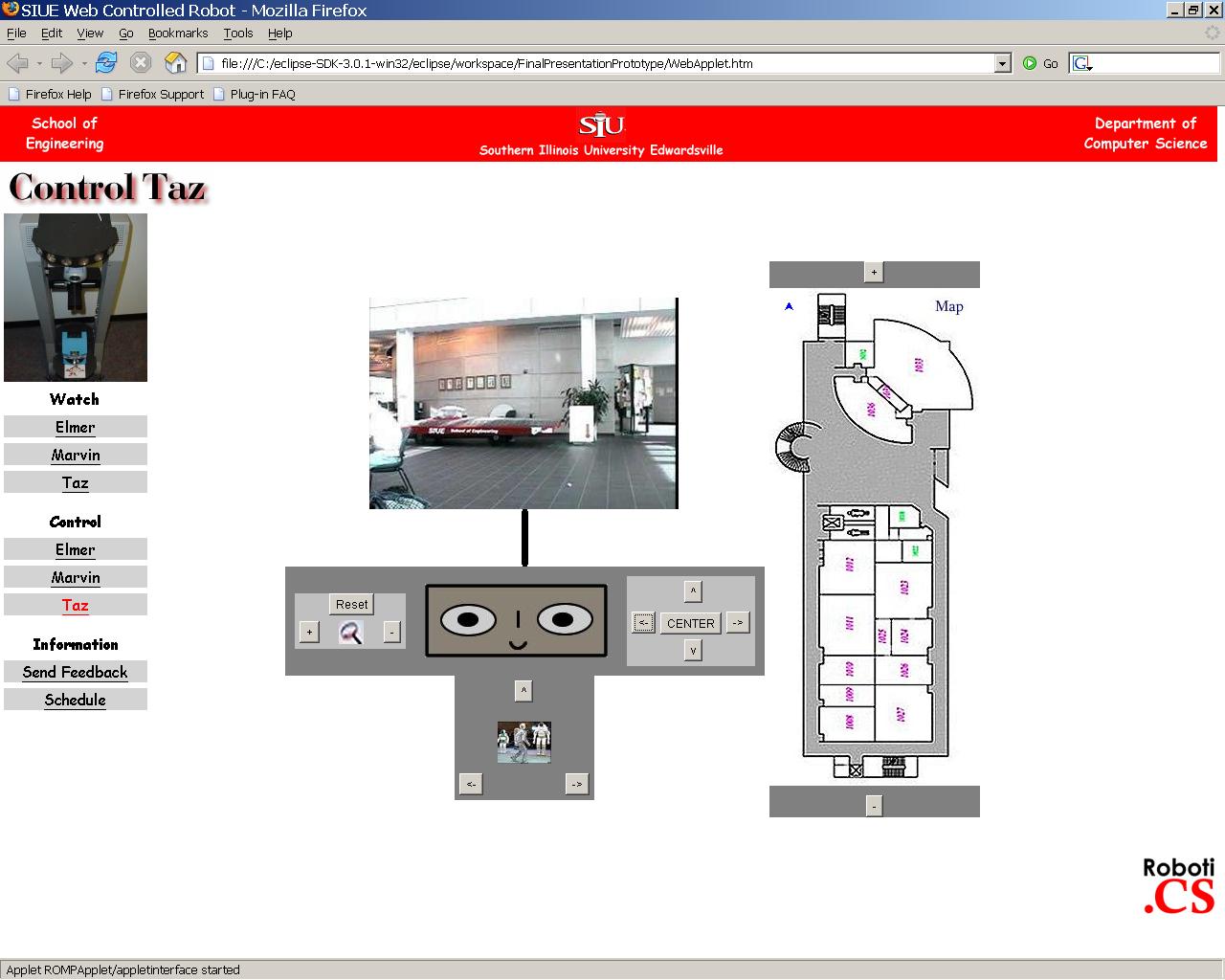
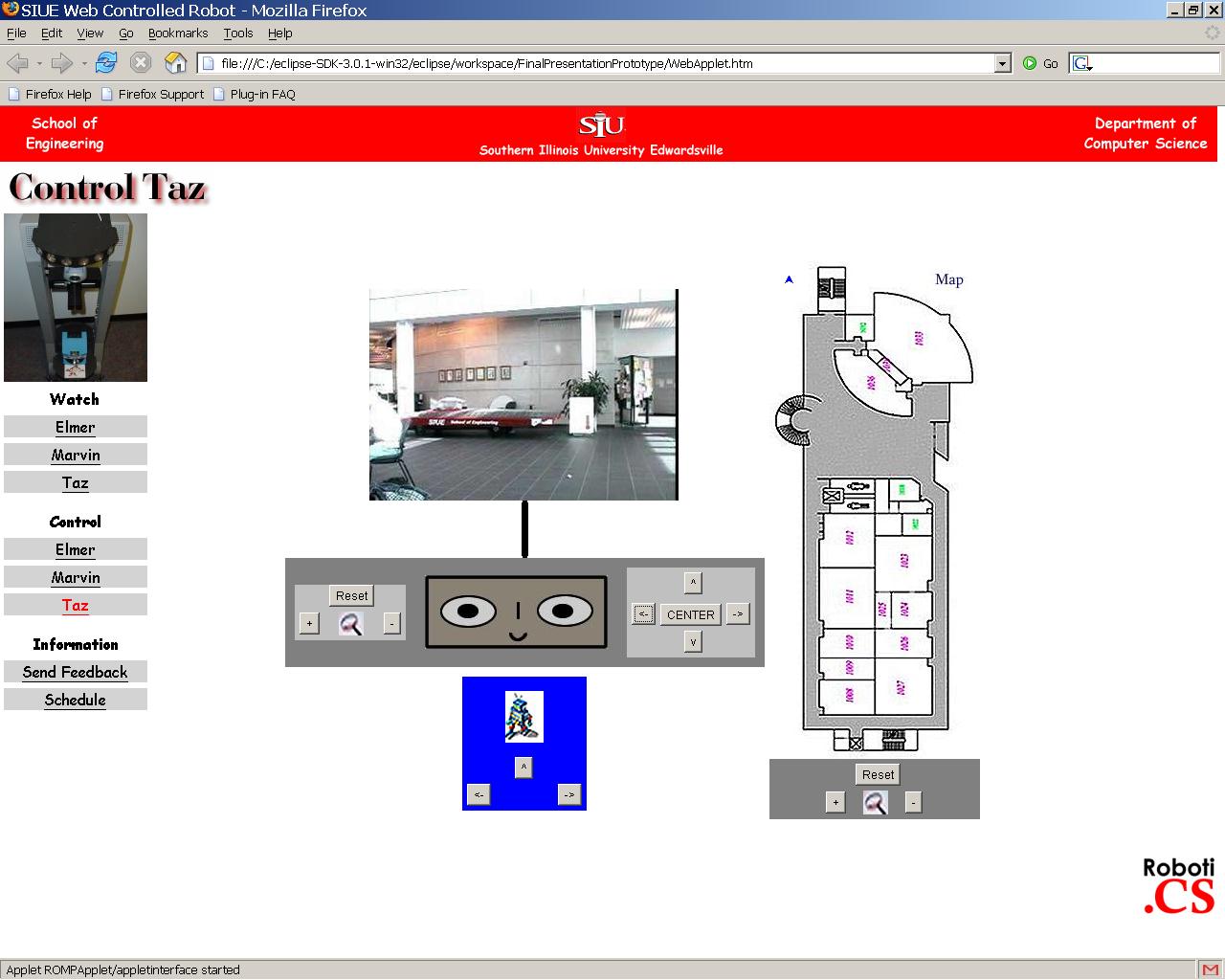
| Prototype 5 | The prototype was tested during the open house on the 19th February 2005. The design seemed very intutive to the users. They were able to click the appropriate controls for the robot movement and camera controls. One of the suggestions was to be able to represnt the camera positon in respect to the robot body. |
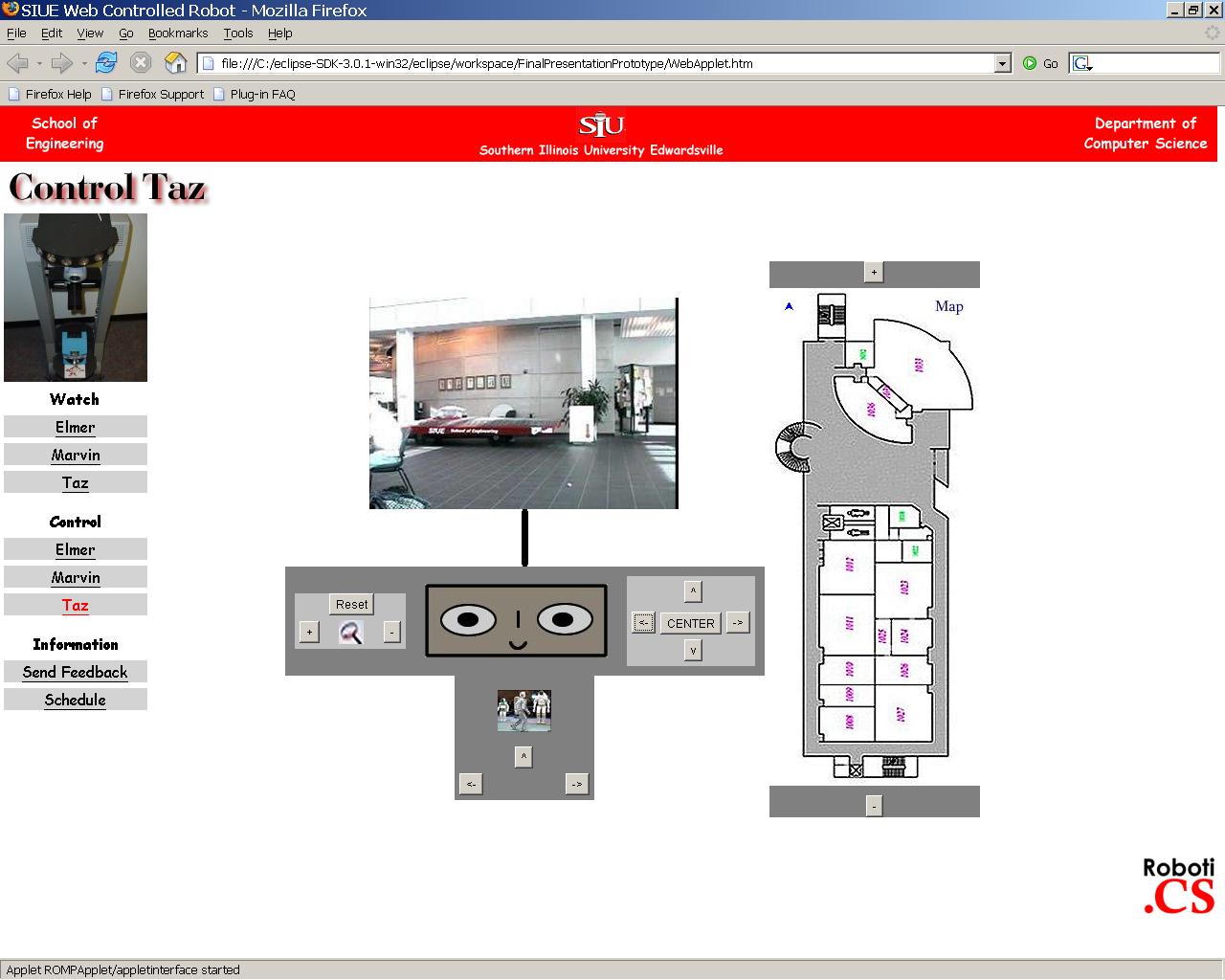
| Prototype 6 | This is the current interface that is being tested. |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
About Us |Contact Us | ©2004 Team Evolution